چاپ ۴ بعدی رباتهای نرم در مقیاس میکرونی
محققان سوئدی موفق به چاپ چهار بعدی اولین ربات های نرم در مقیاس میکرون شده اند.
گروهی از محققان دانشگاه “لینکوپینگ”(Linköping) سوئد، با استفاده از یک چاپگر سه بعدی سفارشی ساز شده، مجموعه ای از ریز فعال کننده ها را برای ساخت ربات های نرم ایجاد کرده اند. این فعال کننده یا محرک ها حاوی یک پلیمر فعال الکتریکی هستند که پس از چاپ شدن در صورت وجود یک بار الکتریکی، تغییر شکل می دهد و قابلیت چهار بعدی را به آنها اعطا می کند.
در حالی که ربات های نرم چاپ چهار بعدی شده معمولاً به مقیاس سانتی یا میلی محدود هستند، این فناوری جدید به محققان اجازه می دهد آن را به مقیاس میکرون ببرند. آنها ربات هایی ساخته اند که ضخامت آنها حدود ۲۰ میکرون است.
محققان ادعا می کنند دستگاه سفارشی سازی شده آنها چند کاره و مقیاس پذیر است و انتظار دارند که با استفاده از میکرو ربات های پیچیده که تاکنون ساخته نشده اند، رباتیک نرم را توسعه دهند.
فناوری پلیمر الکتروفعال(EAP) نیروی محرکه بسیاری از دستگاه های رباتیک نرم است. این فناوری موادی را توصیف می کند که در هنگام قرار گرفتن در معرض بار الکتریکی فعال می شوند.
این ویژگی در ربات های نرم قابل مقایسه با انقباض عضلانی است.
به گفته محققان، تلاش برای به مقیاس میکرون آوردن محرک های EAP اغلب با کوهی از چالش ها روبرو می شود، چرا که ادغام آنها با فناوری های فعلی دشوار است.
اینجا جایی است که فناوری جدید به کار می آید و فواید زیادی را ارائه می دهد، زیرا محصولات حاصل از آن می توانند اصلاح شوند، هزینه ها را به طور قابل توجهی کاهش دهند و تولید ضایعات نیز می تواند تا ۱۰ برابر کاسته شود.
در نهایت این تیم معتقد است که این فناوری می تواند دستگاه های EAP را برای طیف گسترده تری از برنامه ها، ارزان تر و عملی کند.
مرحله اول مطالعه شامل ساخت چاپگر بود. اساس این دستگاه یک مرحله CNC قابل برنامه ریزی با سه محور است که از سیستم پخش سیال با دقت بالا تهیه شده است. یک سرنگ میلی لیتری به سیستم توزیع متصل شد که به موجب آن نرخ پاشش مواد کنترل شد. سپس این تیم از یک اسلاید شیشه ای تجاری به عنوان صفحه ساخت استفاده کرد.
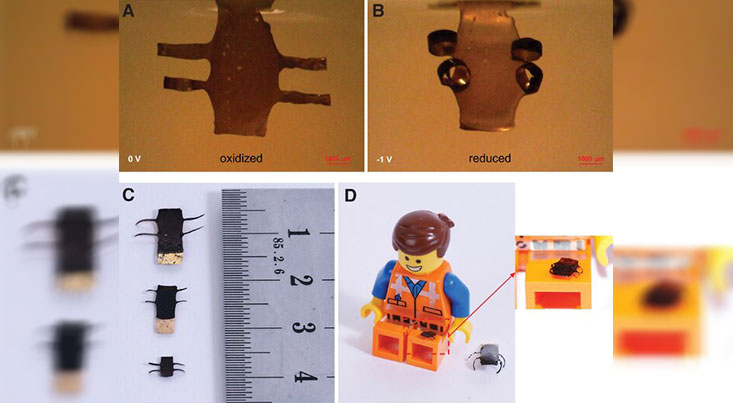
آنها ابتدا یک لایه نازک از طلا به ضخامت فقط ۴۰ نانومتر را روی شیشه قرار دادند تا یک لایه رسانا تشکیل شود. محققان سپس از سرنگ برای پاشش یک لایه از ژل آکریلات اورتان قابل پردازش با اشعه ماوراء بنفش بر روی لایه رسانا استفاده کردند. سپس پاشش ژل ادامه می یابد تا بدنه و بازوهای این میکروربات های نرم شکل بگیرد.
پس از اینکه این ژل کاملاً تحت تابش اشعه ماوراء بنفش پردازش شد، محققان لایه ای از پلی پیرول(EAP) را به طرف دیگر ورق طلا چاپ کردند.
این تیم موفق شد چندین بار این روند را تکرار کند و میکرومحرک ها را با طول های مختلف از ۵۰۰۰ میکرون تا ۱۰۰۰ میکرون چاپ کند. باریکترین رباتی که آنها ساختند فقط ۲۰ میکرون ضخامت داشت.
محققان دریافتند که می توانند ربات هایی با پتانسیل تحریک الکتریکی به اندازه یک ولت بسازند، در حالی که برای سایر روش های چاپ سه بعدی به بیش از یک کیلو ولت نیاز است.
دانشمندان معتقدند که کار آنها پتانسیل بسیار خوبی برای کوچک سازی رباتیک کم هزینه تولید شده از طریق فناوری چاپ سه بعدی دارد.
در مورد ربات های نرم چاپ ۴ بعدی شده چندین روش مختلف تحریک وجود دارد که یکی از آنها فعال سازی الکتریکی است. برای مثال، محققان دانشگاه “رایس” اخیراً ربات های نرم خود را چاپ چهار بعدی کردند که با تغییر دما فعال می شوند. آنها قصد دارند این فناوری را توسعه دهند تا جایی که بتوان از آن در ایمپلنت های زیست پزشکی استفاده کرد.
در جاهای دیگر از جمله در دانشگاه فناوری “نانیانگ” چین، محققان یک قدم فراتر گذاشته اند و و ربات های نرمی را چاپ کرده اند که به هیچ وجه نیاز به دخالت و اعمال ورودی انسان ندارند.
این فرآیند شامل متورم شدن یک الاستومر با اتانول برای القای فشار در ساختار محرک است. وقتی اتانول تبخیر می شود و الاستومر خشک می شود، این ماده با انرژی الاستیک ذاتی که در آن ذخیره شده است، تغییر شکل می دهد.
منبع: ایسنا




